
0 引言
中国能源资源与负荷中心分布极不均衡,大规模能源的开发和全国范围内的资源优化配置决定了中国需要建设远距离的输电通道 [1] 。传统的方式是采用端对端直流输电 [2] ,这种方式无法形成直流换流站端和端之间相互支援,也无法实现各站交流系统相互连接。
对此,一方面需要采用多端直流连接方式解决端和端之间相互支援困难问题;另一方面,为了解决新能源的规模化消纳,迫切需要在电网侧加快新型能源汇集及送出技术的研发以提高新能源发电的利用效率。高压柔性直流电网可解决以上两方面问题,通过对广域内可再生能源发电直流联网,可以充分利用可再生能源发电的互补性,实现新能源发电的大规模集中接入,提高新能源发电利用率。利用直流联网方式,减轻了交流系统固有的功角稳定性问题,可以实现新能源的平滑接入,减少系统备用容量。高压柔性直流输电方式除了可以实现长距离、大容量的电能传输,还有独特的优势 [3-4] ,如:①可以实现有功、无功的独立控制,减小无功需求;②可以实现快速灵活的潮流分布,做到广域功率的调节互济。
柔性直流电网(以下简称“柔直电网”)控制系统是整个直流电网的核心,负责整个柔直电网的潮流控制、运行方式、故障保护等 [5] 。柔直电网的多端协调控制系统采用的架构与控制系统中采用的协调控制方式有很大关系 [6] 。目前文献针对高压柔性直流控制保护系统架构的分析多为对站内控制结构的描述 [7-8] ,对高压直流电网控制保护系统的结构以及扩展方式涉及较少,例如文献[9]中提到的基于多代理技术的控制系统架构。另外在柔直电网中,柔直电网的多端协调控制要考虑双极并联运行特殊性,以及多站在不同通信条件下的统一控制策略。针对多端协调控制,文献[10]从电网直流电压安全角度出发,但没有体现如何充分利用换流站功率裕度增加运行稳定性;文献[11]是为了增加交直流系统动态性能,但没有体现换流站功率裕度对斜率控制的影响 [11] ;文献[12]是同时根据电压偏差和功率偏差得到下垂系数,但由于采用了功率实测值,实测值的准确性会影响下垂系数大小进而影响直流电压调节质量;文献[13]通过直流网络的潮流计算结果,根据实测的功率偏差和直流电压偏差切换控制方式来预防系统过电压,该方案计算量相对大且需要站间通信;文献[14]通过实时监测直流电压偏差来控制下垂系数,缺点是下垂系数的计算过于复杂,选取不当会导致直流电压变大,对设备造成冲击。并且以上文献均没有针对通信条件变化对多端协调控制策略的影响进行分析。
本文在分析各种运行方式下高压柔性直流电网控制目标的基础上,分析多换流站协调控制对控制系统构架的要求,提出基于上层控制的高压大容量多换流站协调控制系统架构,并设计了换流器双极有功和无功闭环控制,以及双极协调控制策略,并提出高压直流电网在有、无通信条件下统一的多换流器协调控制策略,在仿真系统上对双极协调控制策略,以及多换流器不同通信条件下的统一多换流器的协调控制策略进行验证,证明了所提出策略的有效性和正确性。
1 高压大容量多换流站协调控制系统架构
为适应柔直电网运行方式复杂多变的需求,结合柔直电网多换流站协调控制的功能要求,宜采用独立的站间协调控制(上层控制)实现多端换流器间的协调工作,并在物理上尽可能将控制功能配置到较低的控制层次。与双极功能有关的装置尽可能分设到极控制和换流器控制层,使得与双极功能有关的装置减至最少。
为了满足以上直流电网控制要求,推荐将双极控制系统设计为三层结构 [15] ,分别为站间协调控制层、双极控制层和极控制层,其中站间协调控制层作为直流电网综合控制,设置单独的协调控制主机,主要功能包括直流电压范围控制、直流电网潮流优化控制、线路过负荷控制、控制模式和接地方式选择等功能;双极层主要功能包括功率分配、顺序控制、孤岛控制等;极控层包括裕度下垂控制、极的启停控制、换流器过负荷控制、内环电流控制等功能。
站间协调控制可以对直流电网中连接的多站进行总的协调,减少系统运行过程中投退换流阀的扰动,降低站间通信的负载率,当各站与上层协调控制层失去通信联系后,通过设置在极控制层的不依赖于通信的协调控制策略实现换流站的运行。为适应柔直电网运行方式复杂多变的需求,推荐在源端和受端各配置一套站间协调控制SCC设备,采用主备方式实现多换流站间协调控制。当高压直流电网进行换流站扩建时,只需要增加新扩建的站与上层控制之间的通信即可,以一个四站为例,如图1所示,增加远期站后,从原来的四站扩展到五站运行。
多换流站协调控制系统中具备多换流站协调策略,所以需要协调控制系统和各换流站的通信,同时要求协调控制系统具备方便的站间通信扩展能力,需要说明的是:站间协调控制策略对站间通信时间要求并不高,仅仅在涉及调整整个直流电网的直流电压和协调直流电网的直流电压控制站运行时起作用。
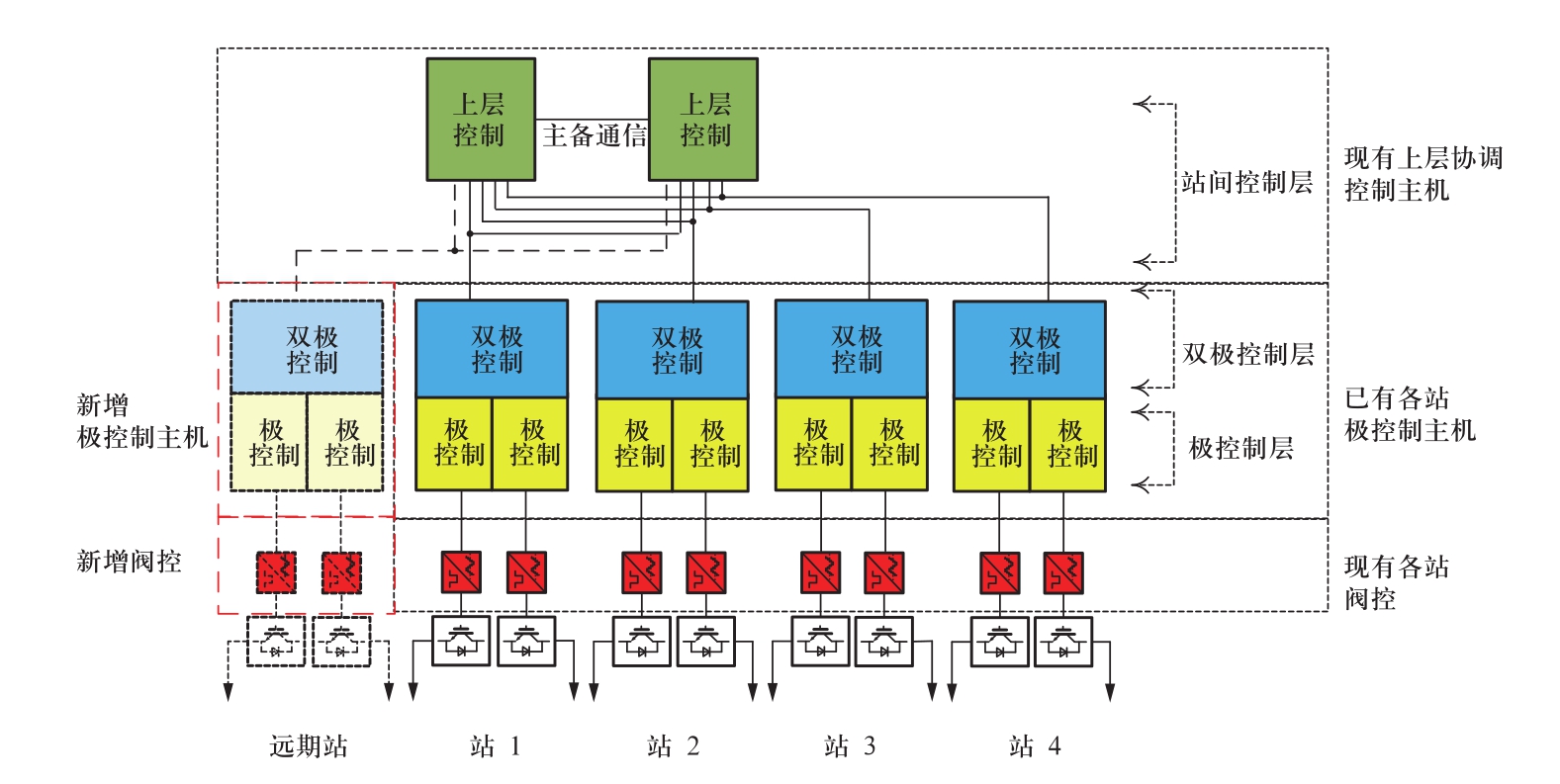
图1 可扩展的直流电网控制架构
Fig.1 Extensible control system framework of the DC power
2 高压直流电网控制策略
2.1 换流站控制策略层次划分
换流站控制功能繁多,整体划分为:系统级、换流站级、换流器级、阀级以及子模块级别,如图2所示。其中系统级控制保护功能是在图1中上层协调控制主机中实现,极控制功能在极控制主机中实现,包含双极控制层与极控制层,其中双极控制层主要作用是接收双极的控制指令以及双极协调控制,双极控制层经过运算输出每极控制指令,具体的执行由极控制层来完成。
2.2 极控制层
换流站基本控制策略是在极控制层实现,极控制层是电压源换流器控制的核心,极控制层接收双极控制层的指令信号,根据控制模式分别对换流站的有功类控制量(有功功率、直流电压或电网频率)和无功类控制量(无功功率或交流电压)进行控制,并将本极有关运行信息反馈给双极控制层。极控制有多种实现方式,如直接控制(Direct Control)、矢量控制(Vector Control)等。极控制通常采用双环控制,即外环控制和内环电流控制 [16-17] 。
为了抑制交流系统故障时产生的过电流和过电压,控制器还包括交流电流控制、电流指令计算及限值控制等功能,这也是VSC采用双环矢量控制器时内在的功能。控制器中还包括过电流限制、负序电压控制、直流过电压控制环节,这对防止因系统故障损坏设备有重要意义。
2.3 双极控制层
2.3.1 基本功能
双极控制层控制主机系统接收远方控制中心的调度控制指令或者站内运行人员手动操作指令,并向调度中心返回有关运行信息。其功能是根据调度中心或控制室运行人员的控制,执行产生的极控制层的控制指令,双极控制只输出控制指令,具体的执行由极控制层来完成。
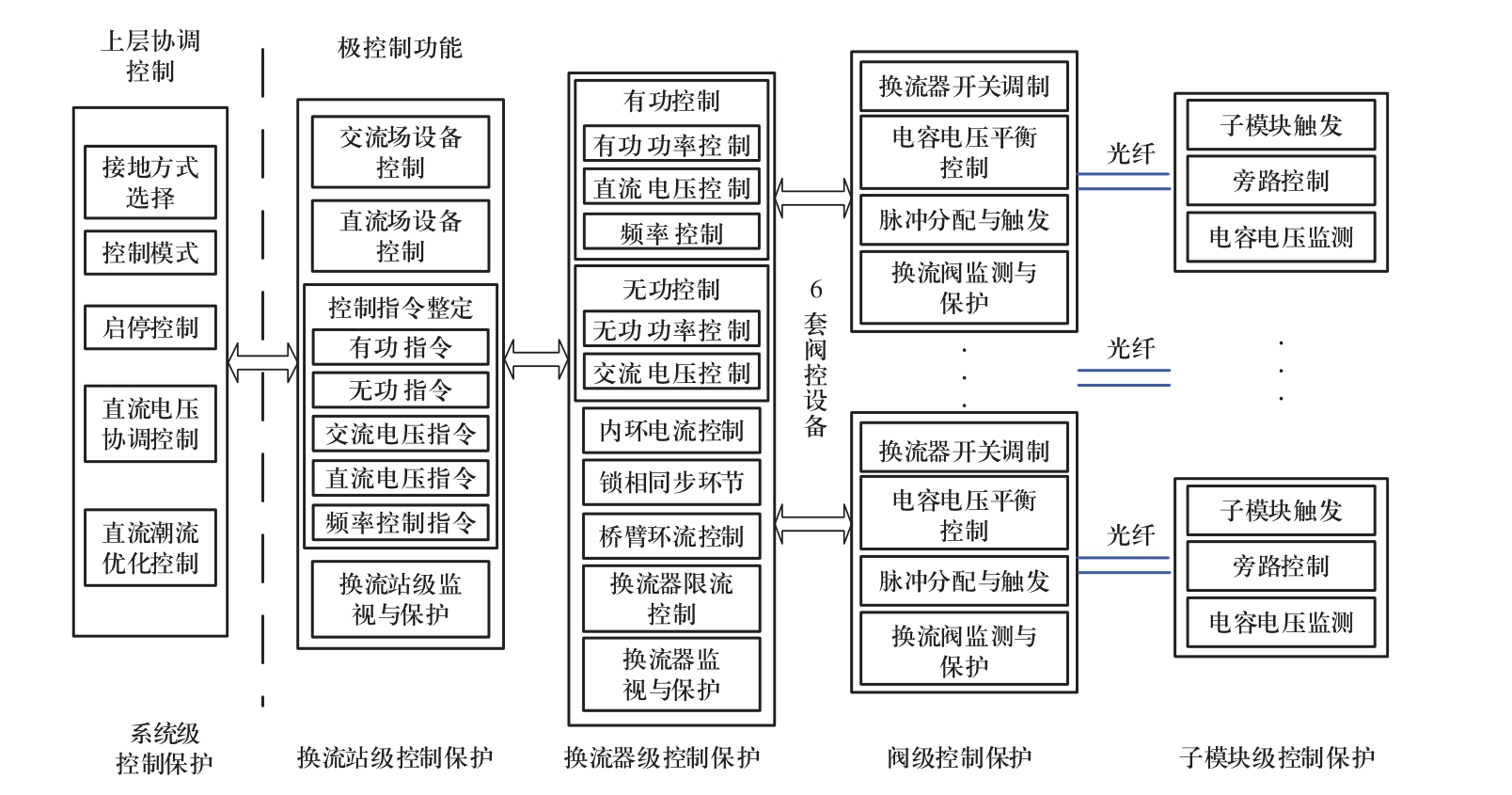
图2 换流站控制保护层次
Fig.2 Multilayer control and protection in converter station
2.3.2 双极协调控制
在双极协调控制模式下,根据两极控制系统优先等级选择其中一个极作为主控,在两极之间通过通信方式协调两极运行。
以双极有功协调控制为例,进行具体说明:
1)双极协调功率控制功能分配到每一极实现,任一极都可以设置为协调控制模式。
2)通常情况下,如果两个极都处于协调控制模式,双极协调功率控制功能为每个极分配相同的功率参考值。
3)如果某极受到限制或者闭锁,协调功率控制将增大另一极的功率,自动维持两极总功率恒定,另一极的功率至多可以增大到规定的设备过负荷水平。
4)双极正常运行时总有一个极处于主控状态,由该极控制系统协调两个换流单元传输功率大小。
当非主控极失去与主控极通信联系后,自动切换到极功率独立控制模式,切换前后保持当前每个极的传输功率不变。
双极有功协调控制策略如图3所示。
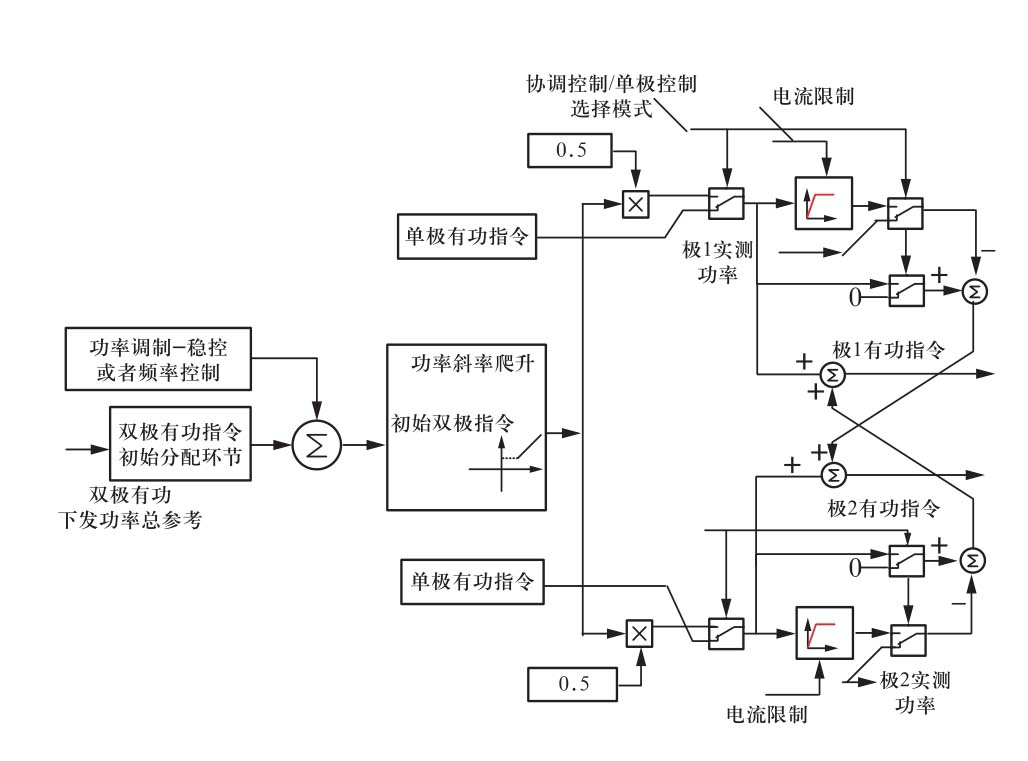
图3 双极有功协调控制
Fig.3 Bi-pole active power coordinated control
双极无功协调控制与图3类似,双极得到有功和无功指令后闭环控制原理如图4所示。
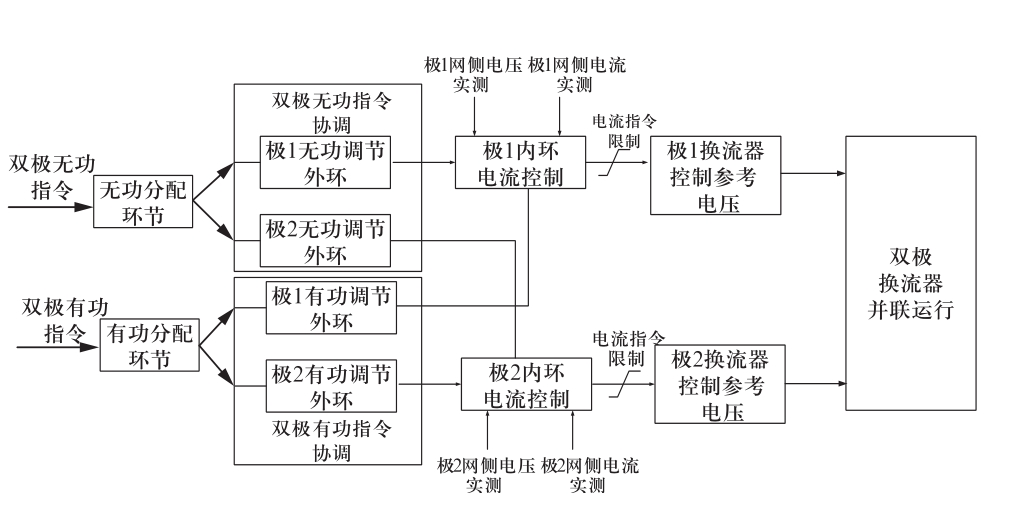
图4 双极有功和无功协调控制
Fig.4 Bi-pole active power and reactive power coordinated control
2.3.3 换流站双极交流电压控制
在有源控制模式下,交流电压控制产生换流器的无功功率指令,并且各个站独立进行控制,该参考值可以由运行人员在操作界面进行输入。利用交流电压控制功能可以实现控制换流变压器网侧的交流电压。
在无源控制模式下,孤岛交流电压控制器为孤岛系统提供波形稳定的交流电压,双极换流器需要协调配合共同为孤岛系统提供电压支撑。本文采用P/f 下垂控制方式实现双极换流器的有功功率协调,采用Q/V下垂控制方式实现双极换流器的无功功率协调,与常规P/f下垂控制有两点不同 [18] :
1)与传统基于频率调节的功率控制相比,参考相位的生成是由两个极的极控制各自独立产生,在双极运行方式下,可以按照两个换流器并联方式,两个换流器之间允许一定的频率偏差。
2)和常规Q/V下垂控制相比,在需要双极不对称运行时,可以调整两个换流器参考功率指令实现,如图5所示,图中P sref 为每个极的初始有功指令,P s 为实际功率,Q sref 为每个极的初始无功指令,Q s 为实际无功,U q 为网侧电压q轴分量,P ref1 为极1有功调节指令,△P lim 为PI环节输出上限限制,△f p 为功率控制环节输出的频率微调指令,θ为参考电压输出相角,ω为角频率。图5实现了一个极在无源模式下功率准确跟踪,另外一个极按照当前两极输入总功率自动调整自身的功率—频率偏差,从而实现剩余功率平衡。
如图5所示,在常规交流电压控制中加入了Q/V下垂特性外环控制器,主要作用是在不同换流器间实现无功在各无功源的分配,其中P/f 下垂控制积分系数K f 为下垂控制斜率。
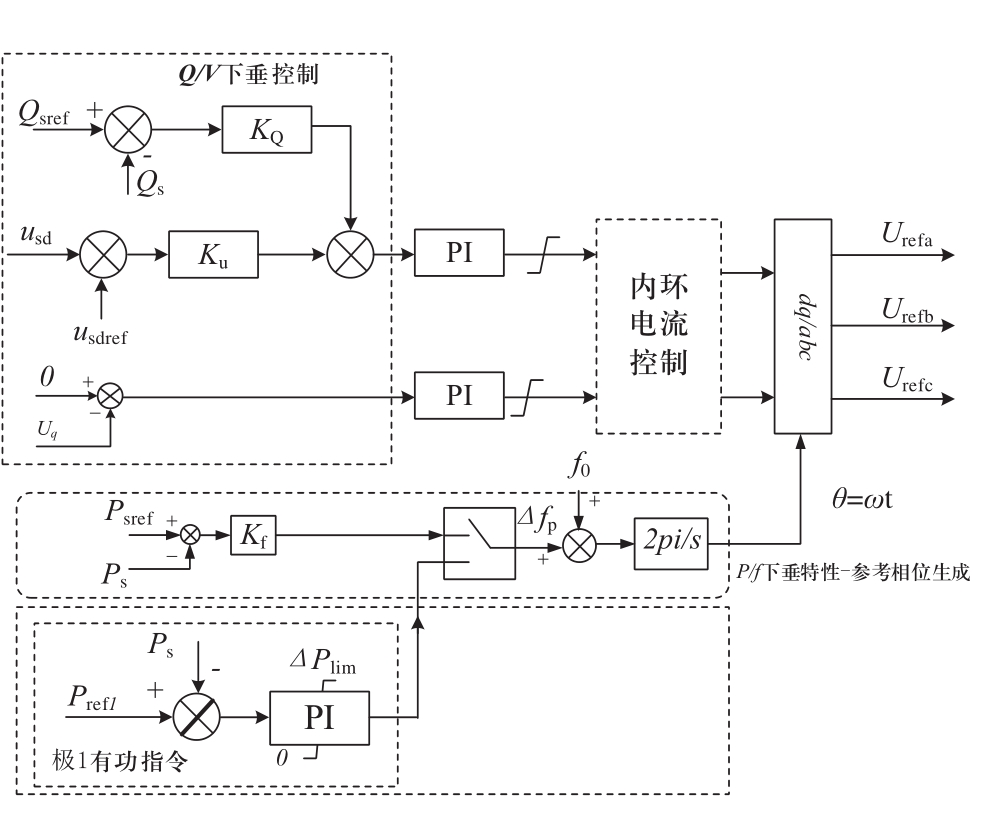
图5 无源方式下双极交流电压协调控制
Fig.5 Bi-pole AC voltage coordinated control in passive network
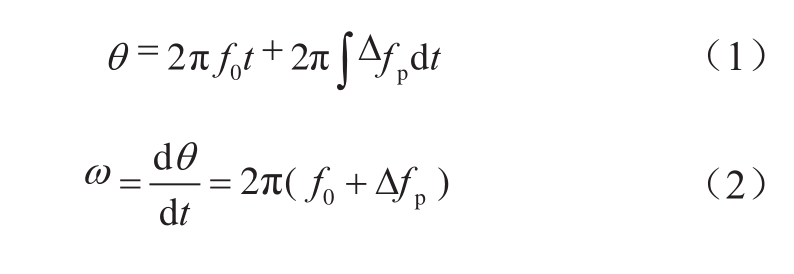
图5中的P/f 下垂特性叠加参考相位生成器用来控制换流器调制电压波形的频率和相位。换流器调制电压波形的幅值则由外环控制器控制。参考电压最终输出为U refa、U refb 、U refc ,根据图5可以得到
上图中,P sref 为每个极的初始有功指令,可以根据当前实际需要输出有功进行实时调整;P ref1 为每个极需要限制输出的功率大小,通常为实际输送功率,特殊情况下,要实现两个极的不对称运行,可以指定极的输出功率大小指令P ref1 ,实现单极的功率准确控制。
2.4 多换流站协调控制
采用改进的直流电压偏差斜率控制策略作为多换流站协调控制策略,如图6所示。该控制方法结合了直流电压偏差控制策略以及直流电压斜率控制策略这两种控制策略的优点,并能够实现站间通信从正常到故障,或从故障到正常时的自适应调整。
本文的改进策略是考虑了多站之间偏差设置,同时考虑了各站当前功率裕度对于直流电压调节稳定作用 [10-11] ,不依赖站间通信 [13] ,不需要实测功率 [12] ,偏差系数计算相对简单 [14] 。改进的直流电压偏差斜率控制策略的不同点主要体现在两个方面:
1)根据各站预先设定的电压偏差ΔU set 大小以及本站换流器能够运行的极限电压区间[U v ,U w ]设定各站斜率,并且该斜率是随当前实际功率变化修正,能够在保证整体平衡运行目标下充分利用各站功率裕度。
以站3为例,令该站的功率指令从P s1 变化至P s2 时,则该站的当前运行斜率为
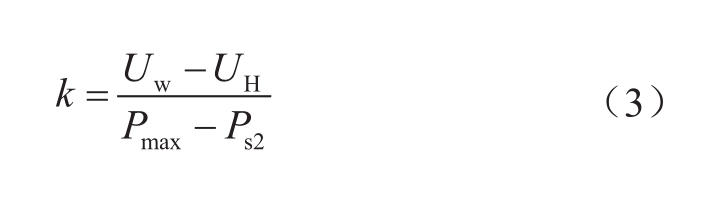
式中,U H 是斜率控制启动上限电压;P max 为换流站能够运行的最大功率极限;P s2 为当前功率指令。
2)预先设定其中一个具有容量较大的功率受端或者送端换流站作为无通信条件下优先斜率控制站,预先设置的下垂系数是根据当前站的功率指令以及电压偏差ΔU set 设置值计算得到。容量较大的功率控制换流站电压偏差ΔU set 数值相对较小,因此在当前直流电压控制站功率越限或者失去直流电压控制站后,能够优先进入斜率控制,以此平衡整个直流电网的功率。如图6所示,设定站4具有优先斜率控制权,电压偏差ΔU set 大小与其他站比较如下
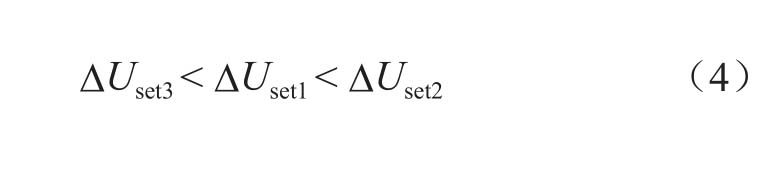
式中,ΔU set1 是站2的电压偏差设定;ΔU set2 是站3的电压偏差设定;ΔU set3 是站4的电压偏差设定。实际运行时,各个换流站的控制器自动检测本地直流电压并设置相应的死区,当直流电压没有超过阈值时,斜率控制的下垂系数为0,各个换流站运行在定直流电压控制或定有功功率控制模式下;当系统受到较大的扰动后,直流电压超过阈值并触发下垂控制,下垂系数变为预先设置的值。
直流电网在下垂控制的调节下重新稳定在新的工作点上。除了在发生特别严重的系统故障(例如定直流电压站退出)时,该控制方法在站间通信正常时不会触发下垂控制;在站间通信发生故障后,如果系统没有受到扰动,控制系统也不会触发下垂控制,这就保证了系统的平稳过渡。因此,该控制方法不依赖于站间通信故障的判别,对站间通信的任意故障都具有适应性。
3 仿真验证
3.1 双极控制策略验证
图7所示为四端高压柔直环网拓扑以及运行参数,其中站1~站4功率依次为3000、3000、1500、1500 MW,四站均为双极结构。站2接入3000 MW风机,可以运行在联网或者孤岛方式,站2交流侧接入AC Chopper。
算例1:在RTDS搭建图7所示的四端高压柔直环网拓扑,初始运行条件为四站联网运行,其中站2双极初始功率+0.5 pu,站3和站4分别为+1.0 pu和-1.0 pu,站1定直流电压控制运行,后站2极1闭锁。图8为双极控制模式下站2单极极1闭锁后极2的结果。
图8中的数值从上到下依次为网侧电流、网侧功率、直流电压以及极母线电流、上桥臂电流。图8(a)是极1闭锁后仿真结果,图8(b)是极2仿真结果。
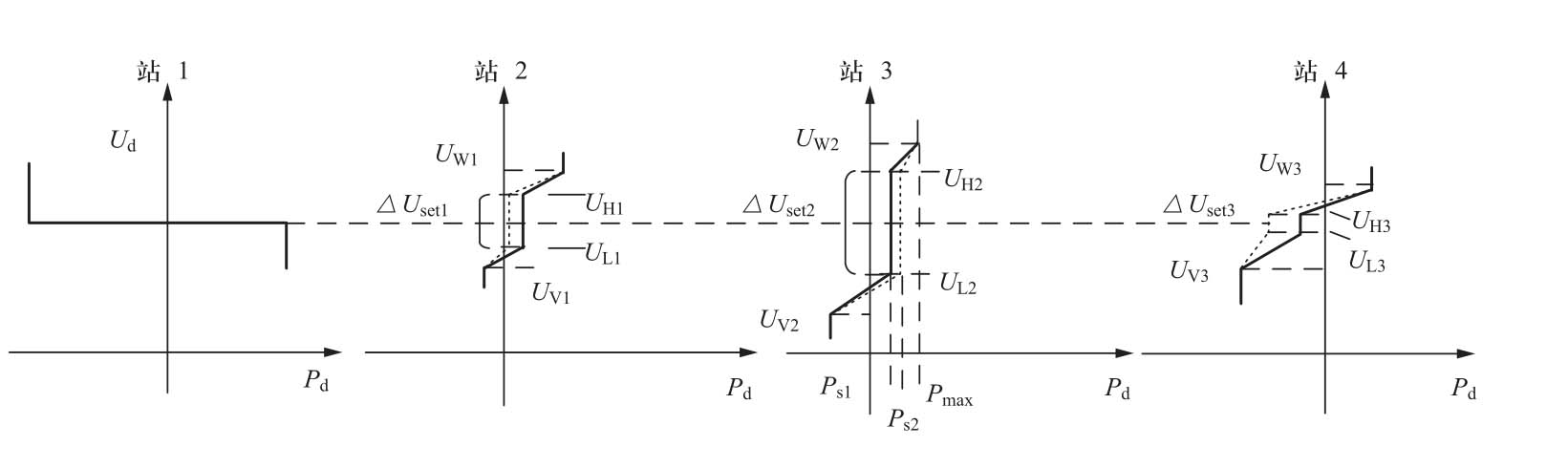
图6 改进的直流电压偏差斜率控制策略
Fig.6 Improved DC voltage deviation slope control strategy
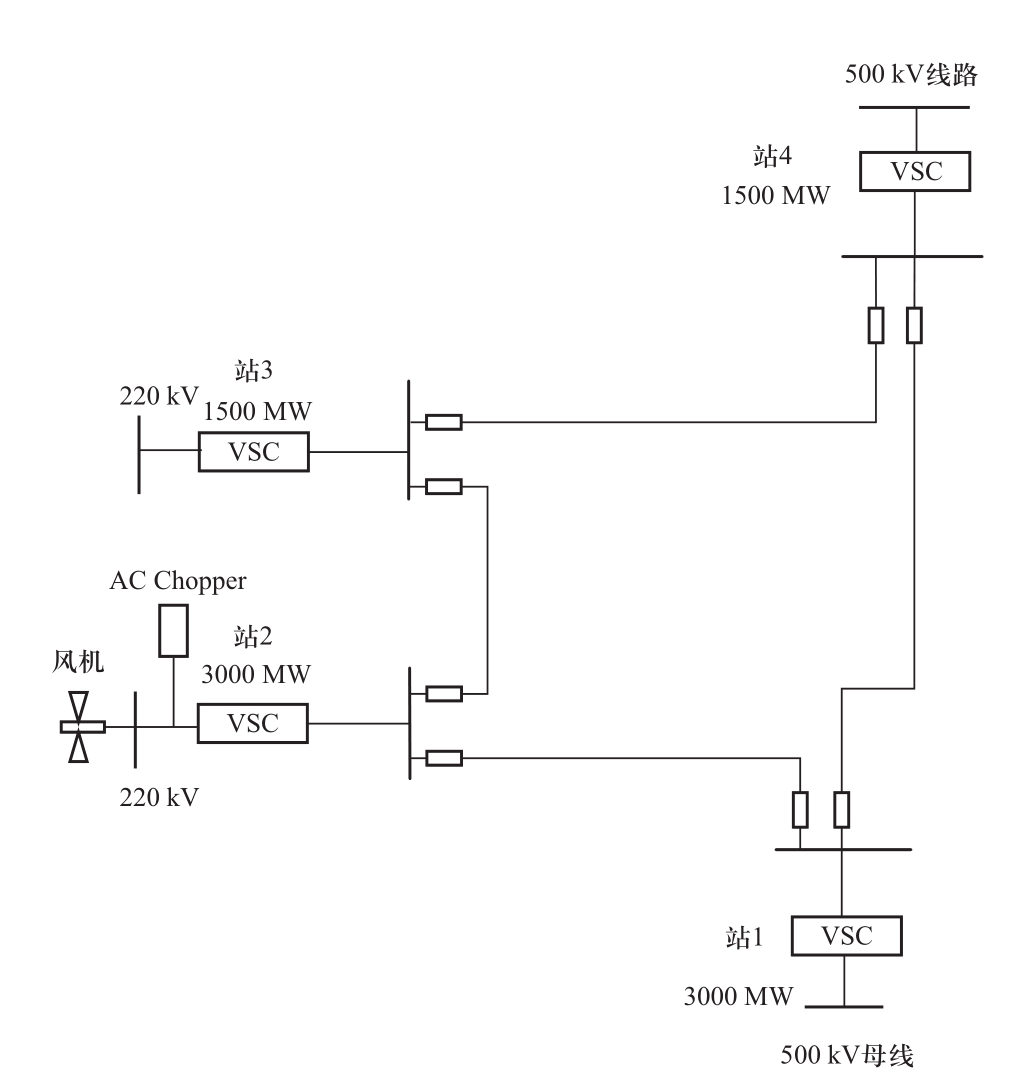
图7 四端直流电网拓扑以及运行参数
Fig.7 Topology and operation parameters of 4-terminals flexible DC grid
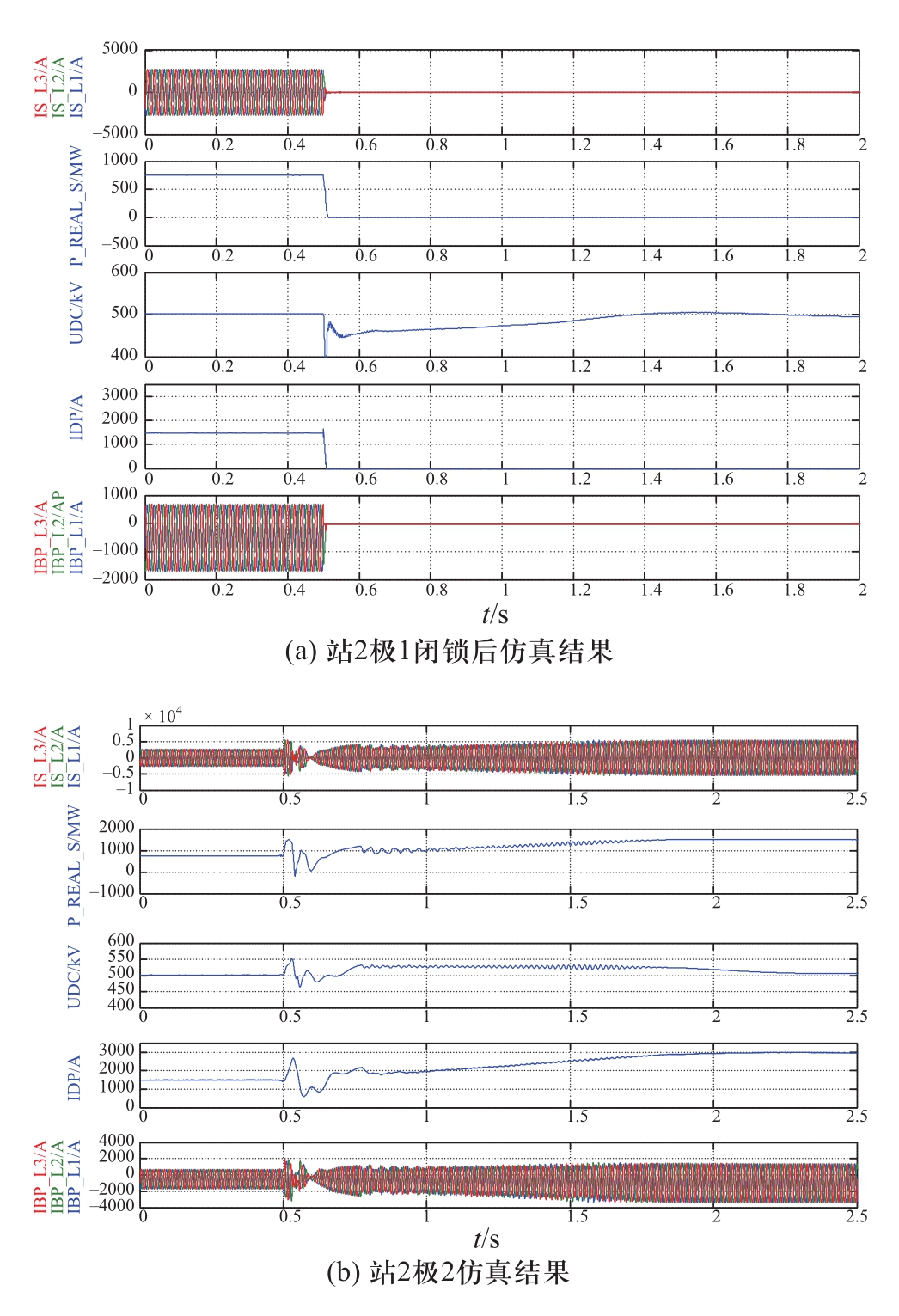
图8 站2极1和极2仿真结果
Fig.8 Experimental data of station 2 pole1 and pole 2
以上结果表明:站2双极功率1500 MW,闭锁前双极各分750 MW,极1单极闭锁后,极2功率从750 MW升到1500 MW,站1极1功率变成0,站3和站4保持运行前功率不变,结果验证了双极的功率转代功能正确,以及双极协调控制策略正确。
算例2:以图7四端高压大容量柔直环网为例,站2、站3交流电压控制到230 kV,站4、站1交流电压控制到525 kV,站1双极均为1 pu。站1双极稳态运行下交流侧电压和功率情况如图9所示。
图9中的数值从上到下依次为:网侧电流、网侧功率、直流电压以及极母线电流、网侧交流电压幅值。从图9可以看出:站1交流电压控制到525 kV。各站母线电压被控制在设定指令值,其中站1交流电压瞬时值上下波动的范围为526.4~523.5 kV,波动范围为0.28%,四站交流电压波动范围均在1%以内。双极交流电压控制策略合适,满足性能要求。
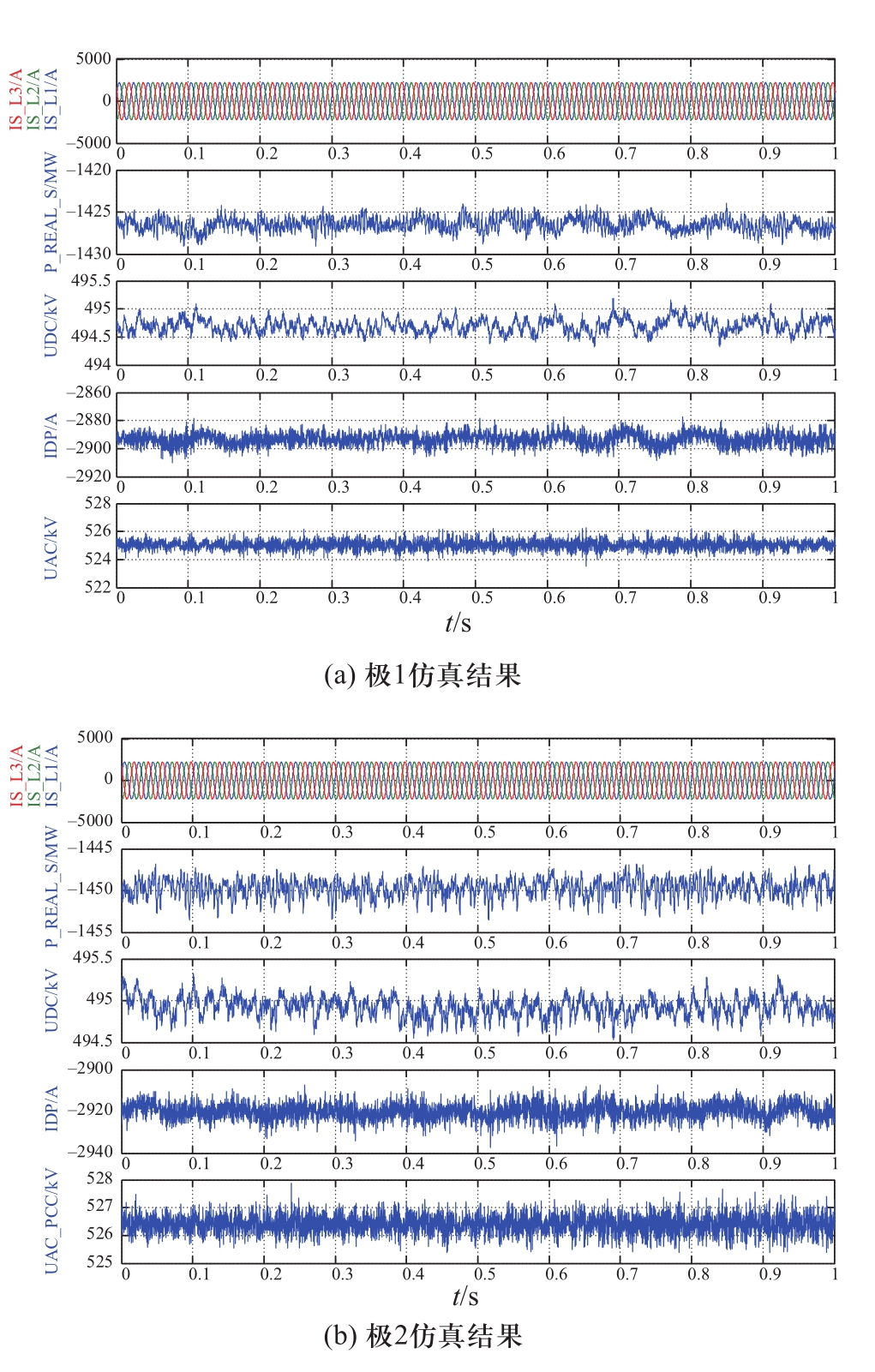
图9 站1有源运行下,极1和极2双极交流电压控制仿真结果
Fig.9 Bi-pole AC voltage coordinated control results in active network for pole1 and pole 2 of station 1
算例3:以图7四端高压大容量柔直环网为例,初始状态下,站2孤岛方式,双极传输风机有功功率2000 MW,平衡运行,单极1000 MW。交流侧设置了AC Chopper装置,在故障后可以进行投切。
模拟站2极2的控制系统发生紧急故障闭锁退出,站2极2发生单极闭锁后波形如图10所示。
图10中的数值从上到下依次为:交流网侧电压U S_L1,kV;阀侧电压U VC_L1,kV;直流侧正负极电压U DP、U DN,kV;网侧有功功率P_REAL_S,MW;网侧无功功率Q_REAL_S,Mvar;ACTV=1表示当前是运行系统,DEBLOCKED=1表示当前处于解锁运行状态。
从图10可以看出:站2极2发生单极闭锁后,极2功率损失无法送出,此时外部新能源继续输入,闭锁2 ms后投AC Chopper,极2的功率由AC Chopper进行转移,同时,极1可以转带极2一部分功率,使极1达到满负荷运行。等待安控装置动作,切除风机500 MW,直流电网功率达到新的平衡。整个过程中损失单极500 MW的功率,且切除过程运行平稳,交流电网几乎没有扰动。

图10 站2孤岛双极运行方式下,极2发生单极闭锁后站1和站2的仿真结果
Fig.10 Experimental data of station 1 and sation2 after pole 2 of station 2 blocked in island operation mode
综上所述,站2双极的整个动作时序描述如下:
极2发生单极闭锁,2 m s后投入交流侧AC Chopper,极1转代部分功率,最大达到满负荷1500 MW运行,安稳装置动作切除风机,AC Chopper退出,极1恢复正常运行。
3.2 多换流站协调控制仿真验证
算例1:在无通信条件下检验单极闭锁时直流电压协调控制功能正确性,初始条件为四站环网运行,站2送端满功率3000 MW,站3功率为1500 MW,站4功率为-1500 MW,站1定直流电压控制运行。模拟站1极1闭锁。四站单极运行结果如图11所示。

图11 四站网侧功率和直流电压仿真结果
Fig.11 Expermental data of power and DC voltage of 4 stations
图11中的数值从上到下依次为:四站的直流电压U DC_S1~S4,kV;四站的网侧有功功率P_REAL_S_S1~S4,MW。
试验结果表明:双极运行并且双极都具备直流电压协调控制功能时,在无通信条件下出现直流电压控制站单极闭锁时,在基于无通信直流电压协调控制作用下,送端站2直流电压升高至528 kV,同时功率从1500 MW减小到505 MW,站3由于直流电压升高,功率降低到267 MW,站2与站3同时进行斜率控制,站4功率保持750 MW不变。四站能够保持稳定运行,只是由于没有站间通信,其中站2和站3两站进入斜率调节后,直流电压运行略高,但能在无通信条件时,在直流电压协调控制功能作用下继续运行。另外一极运行不受影响。
通信恢复瞬间,站2、站3以及站4的网侧功率和极1直流电压变化情况如图12所示。
图12中的数值从上到下依次为:四站的直流电压U DC_S1P1~S4P1,kV;四站的网侧有功功率P_REAL_S_S1P1~S4P1,MW。
通信恢复后各站功率基本不变,出口直流电压保持为500 kV运行,站2极1功率从满功率750 MW降低到505 MW,通信恢复后功率基本保持不变,直流电压保持为500 kV,站4功率通信恢复前后保持为750 MW不变,变成直流电压控制,直流电压控制为500 kV,从无通信切换为有通信条件下,本策略保持各站功率基本不变,按照斜率改变功率指令为当前实际功率,其中一个站(对于本例是站4)由斜率控制切换为定直流电压控制,控制直流电网直流电压为额定数值。验证了在无通信条件下发生单极闭锁后,通信条件恢复后平稳切换到新的运行状态,验证了协调控制在通信恢复前后的切换策略正确。
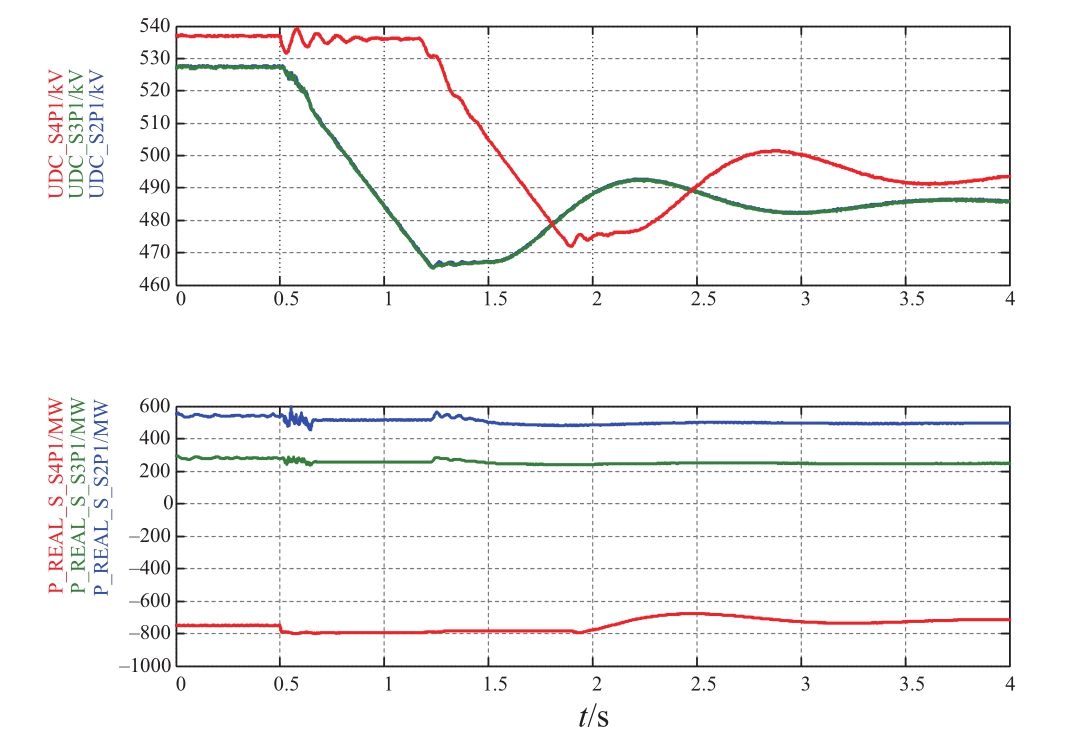
图12 通信恢复瞬间,四站极1直流电压和网侧功率
Fig.12 Pole 1 DC voltage and active power of 4 stations in network side as the communication recover
算例2:在有通信条件下检验单极闭锁时直流电压协调控制功能正确性,初始条件为四站环网运行,站2送端满功率3000 MW,站3功率为1500 MW,站4功率为-1500 MW,站1定直流电压控制。模拟站1极1闭锁。站1极1闭锁瞬间,极1直流电压和网侧功率变化情况如图13所示。
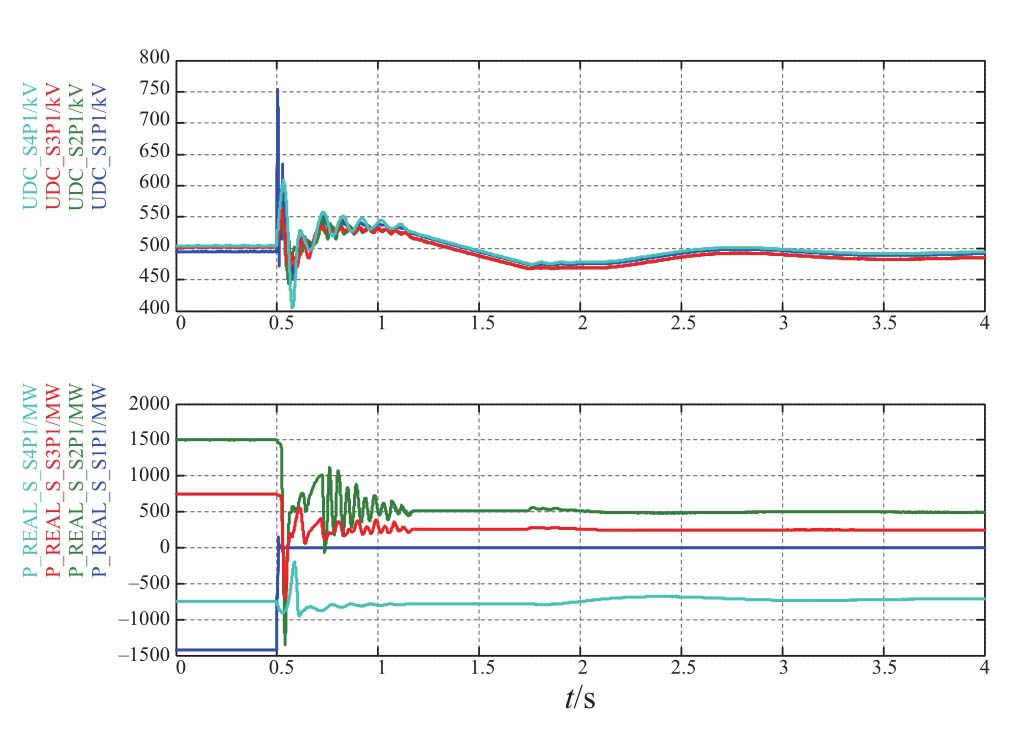
图13 站1极1闭锁瞬间,四站极1直流电压和网侧功率
Fig.13 Pole 1 DC voltage and active power of 4 stations when station1 pole 1 blocked
假定稳定运行后出现通信故障,通信恢复瞬间,四站极1直流电压和网侧功率变化如图14所示。
图14中的数值从上到下依次为:四站的直流电压U DC_S1P1~S4P1,kV;四站的网侧有功功率P_REAL_S_S1P1~S4P1,MW。
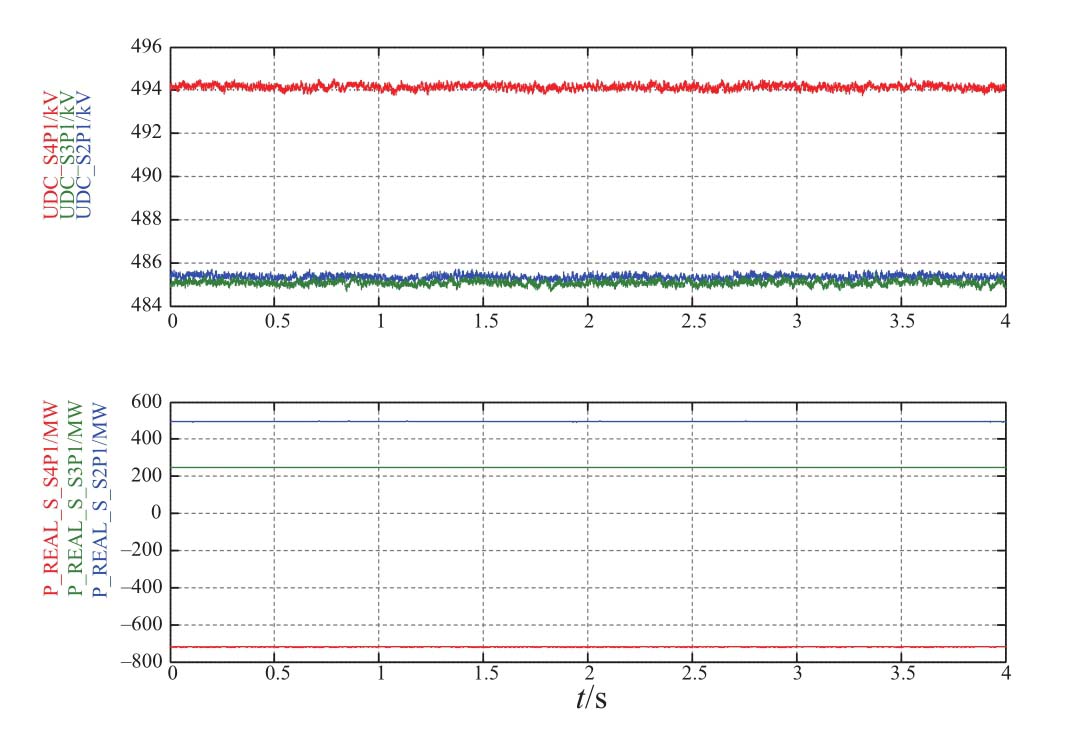
图14 通信恢复瞬间,四站极1直流电压和网侧功率
Fig.14 Pole 1 DC voltage and active power of 4 stations when communication recover
试验结果表明,在初始条件下:站2送端满功率3000 MW,站3功率为1500 MW,站4功率为-1500 MW,站1定直流电压控制运行,假定站1极1闭锁后,在有通信条件下,站2和站3分别降功率到495 MW以及248 MW,分别为站4的单极满功率的2/3以及1/3,站4接管直流电压控制,通信故障后,各站保持当前控制方式以及功率不变。验证了在无通信条件下发生单极闭锁,通信条件恢复后平稳切换到新的运行状态,验证了协调控制通信故障瞬间切换策略的正确性。
4 结论
本文提出基于上层控制的高压大容量多换流站协调控制系统架构,在此基础上设计了大容量换流器双极有功、无功和交流电压闭环控制策略,针对柔性直流电网应用,设计了双极协调控制方法,在控制保护和RTDS组成的仿真系统上进行了动态性能验证,并提出高压直流电网在有、无通信条件下统一的多换流器的协调控制策略,避免通信条件变化后控制切换,实现通信条件丢失以及重新恢复后的平滑切换,同时设定通信条件变化前后的直流电压控制站轮换原则,较好实现电压调节和故障下换流站平衡运行,在仿真系统上对多换流器不同通信条件下的统一多换流器协调控制策略进行验证,以及功率转代功能试验验证,证明了所提出策略的有效性和正确性。
参考文献
[1] 温家良,吴锐,彭畅,等.直流电网在中国的应用前景分析[J].中国电机工程学报,2012,32(13):7-12.Wen Jialiang, Wu Rui, Peng Chang, et al.Analysis of DC Grid Prospects in China[J].Proceedings of the CSEE, 2012,32(13): 7-12 (in Chinese).
[2] 汤广福,罗湘,魏晓光.多端直流输电与直流电网技术[J].中国电机工程学报,2013,33(10):8-17.Tang Guangfu, Luo Xiang, Wei Xiaoguang.Multi- terminal HVDC and DC-grid Technology[J].Proceedings of the CSEE,2013, 33(10): 8-17 (in Chinese).
[3] 姚良忠,吴婧,王志冰,等.未来高压直流电网发展形态分析[J].中国电机工程学报,2014,34(34):6007-6020.Yao Liangzhong, Wu Jing, Wang Zhibing, et al.Pattern Analysis of Future HVDC Grid Development[J].Proceedings of the CSEE, 2014,34(34):6007-6020 (in Chinese).
[4] 王一振,赵彪,袁志昌,等.柔性直流技术在能源互联网中的应用探讨[J].中国电机工程学报,2015,35(14):3551-3560.Wang Yizhen, Zhao Biao, Yuan Zhichang, et al. Study of the Application of VSC Based DC Technology in Energy Internet[J].Proceedings of the CSEE, 2015, 35(14): 3551-3560(in Chinese).
[5] 韩亮,白小会,陈波,等.张北 ±500 kV 柔性直流电网换流站控制保护系统设计[J].电力建设,2017,38(3):42-47.Han Liang, Bai Xiaohui, Chen Bo, et al.Control and Protection System Design of Zhangbei ± 500 kV Converter Station in VSC-HVDC Power Grid [J].Electric Power Construction,2017, 38(3): 42-47 (in Chinese).
[6] 董云龙,胡兆庆,田杰 ,等.多端柔性直流控制保护系统架构和策略[J].南方能源建设,2016,3 (2):21-26.Dong Yunlong, Hu Zhaoqing, Tian Jie, et al.Frame of Control and Protection System and Control Strategy Im plement in Multi-terminal VSC-HVDC System [J].Southern Energy Construction, 2016, 3 (2): 21-26 (in Chinese).
[7] 董云龙,包海龙,田杰,等.柔性直流输电控制及保护系统[J].电力系统自动化,2011,35(19):89-92.Dong Yunlong, Bao Hailong, Tian Jie, et al.Control and Protection System for VSC-HVDC.Automation of Electric Power System, 2011, 35(19): 89-92 (in Chinese).
[8] 董云龙,凌卫家,田杰,等.舟山多端柔性直流输电控制保护系统[J].电力自动化设备,2016,36 (7):169-175.Dong Yunlong, Ling Weijia, Tian Jie, et al.Control &Protection System for Zhoushan Multi-terminal VSC-HVDC[J].Electric Power Automation Equipment, 2016, 36(7): 169-175 (in Chinese).
[9] 吴俊宏,艾芊,章健,等.基于多代理技术的VSC-MTDC控制系统[J].电力系统自动化,2009,33 (19):85-89.Wu Junhong, Ai Qian, Zhang Jian, et al.A VSC-MTDC Control System Based on Multi-agent Technology [J].Automation of Electric Power System, 2009, 33(19): 85-89 (in Chinese).
[10] 任敬国,李可军,张春辉,等.基于直流电压—有功功率特性的VSC-MTDC 协调控制策略[J].电力系统自动化,2015,39(11):8-15.Ren Jingguo, Li Kejun, Zhang Chunhui, et al.A Coordinated Control Strategy for VSC-MTDC System Based on DC Voltage-active Power Characteristic[J].Automation of Electric Power Systems, 2015, 39(11): 8-15 (in Chinese).
[11] 王珂,刘建涛,李亚平,等.柔性直流输电系统的自适应下垂反馈控制方法[J].电力系统保护与控制,2014,42(9):48-53.Wang Ke, Liu Jiantao, Li Yaping, et al.An Adaptive Power Controlstrategy Based Droop Feedback for VSC-HVDC[J].Power System Protection and Control.2014, 42(9): 48-53 (in Chinese).
[12] 陈大鹏,陈朋,李梅航,等.适用于多端柔性直流输电系统的优化下垂控制策略[J].电力系统自动化,2017,41(9):194-199.Chen Dapeng, Chen Peng, Li Meihang, et al.Optimized Droop Control Stratagey for Voltage Source Converter Based Multi-terminal Direct Current System[J].Automation of Electric Pow er System s, 2017, 41(9): 194-199 (in Chinese).
[13] 苗丹,刘天琪,王顺亮.基于多端直流网络潮流分布的变斜率下垂控制策略[J].电力建设,2017,38(3):19-26.Miao Dan, Liu Tianqi, Wang Shunliang.Variable-slope Droop Control Strategy Based on Power Flow Distribution of Multiterminal DC Grid[J].Electric Power Construction, 2017,38(3): 19-26 (in Chinese).
[14] 陈鹏,李梅航,严兵,等.适用于多端柔性直流输电系统的通用控制策略[J].电力系统自动化,2016,40(21):47-52,97.Chen Peng, Li Meihang, Yan Bing, et al.General Control Stratagem for VSC-based Multi-terminal DC System s[J].Automation of Electric Power Systems, 2016,40(21): 47-52,97 (in Chinese).
[15] 梁少华,田杰,曹冬明,等.柔性直流输电系统控制保护方案[J].电力系统自动化,2013,37(15):59-65.Liang Shaohua, Tian Jie, Cao Dongming, et al.A Control and Protection Scheme for VSC-HVDC System[J].Automation of Electric Pow er System s, 2013, 37(15): 59-65 (in Chinese).
[16] 李燕青,王子睿.多端柔性直流输电系统的控制策略设计[J].华北电力大学学报,2017,44(6):41-46.Li Yanqing, Wang Zirui.Design of Control Strategy for Multiterminal VSC-HVDC Transmission System [J].Journal of North China Electric Power University.2017, 44(6): 41-46 (in Chinese).
[17] 张建坡,田新成,尹秀艳.模块化多电平换流器直流输电控制策略[J].电力自动化设备,2015,35(11):103-108.Zhang Jianpo, Tian Xincheng, Yin Xiuyan.Control Strategy of MMC-HVDC[J].Electric Power Automation Equipment,2015, 35(11): 103-108 (in Chinese).
[18] 刘昇,徐政,唐庚,等.MMC-HVDC 联网及孤岛运行状态转换策略[J].中国电机工程学报,2015,35(9):2152-2161.Liu Sheng, Xu Zheng, Tang Geng, et al.Study on MMCHVDC Switching Scheme Between Grid-Connected and Passive Islanding Mode[J].Proceedings of the CSEE, 2015,35(9): 2152-2161(in Chinese).
Flexible DC Grid Multi-terminal Control and Protection System Framework and Control Strategy
HU Zhaoqing, DONG Yunlong, WANG Jiacheng, WANG Nannan, TIAN Jie, LI Haiying
(NARI-Relays Electric Co., Ltd., Nanjing 211102, Jiangsu Province, China)
Abstract: A control system framework based on upper control is proposed based on the analysis of the control objectives of high voltage and large capacity flexible DC power grid.The bipolar active, reactive and AC voltage closed-loop control strategy as w ell as bipolar coordinated control method for flexible DC power grid is designed.Furthermore, coordinated control strategy in different communication conditions among the stations of flexible DC grid is proposed.Control and protection system connected RTDS form the closed-loop digital simulation system, which is used to verify the proposed framework and control strategy, at last the simulation results are demonstrated,the simulation results show the effectiveness.
Keywords: flexible DC power grid; framework; coordinated control strategy; simulation
Science and Technology Foundation of SGCC ‘Key Technology Research and Prototype Development of ±500 kV/3000 MWHigh Voltage and Bulk Capacity Modular Voltage Sourced Converter’(DW/600015).

胡兆庆
作者简介:
胡兆庆(1976),男,博士,高级工程师,主要从事特高压直流输电及柔性直流输电方面的研究,E-mail:huzq@nrec.com。
董云龙(1977),男,硕士,高级工程师,主要研究方向为特高压直流输电、柔性直流输电及柔性交流输电技术。
王佳成(1987),男,硕士,工程师,主要研究方向为特高压直流输电、柔性直流输电及柔性交流输电技术。
(责任编辑 赵杨)